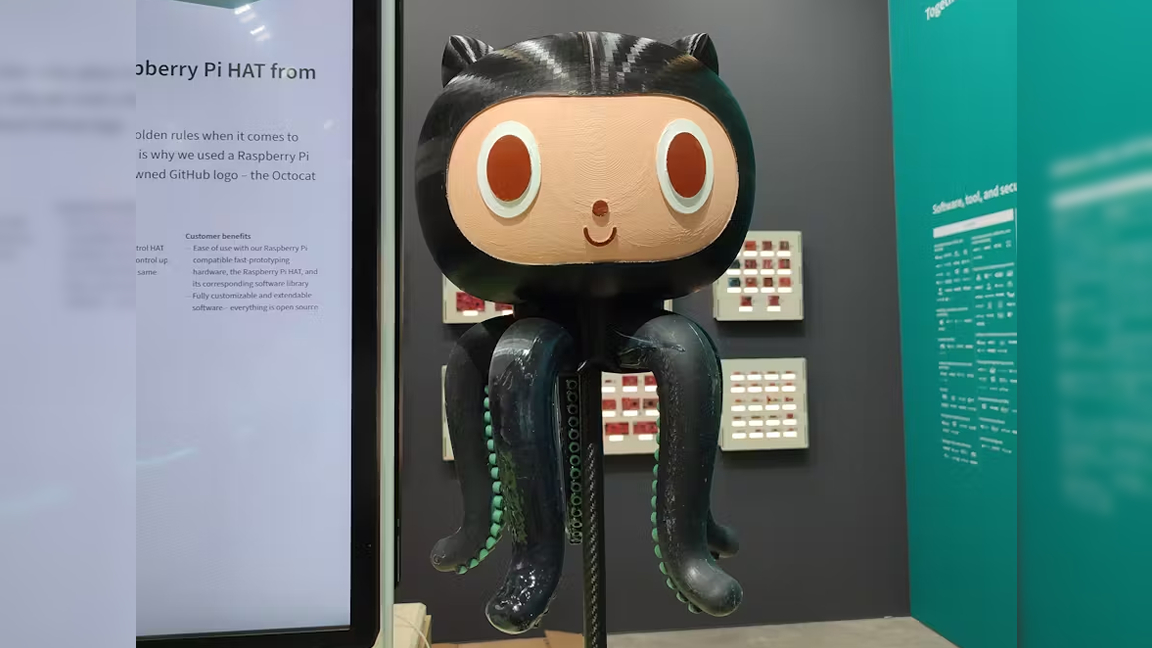
Anyone who's been to GitHub before has no doubt come across the unforgettable Octocat mascot. Its pointy ears and friendly smile accompany a wide library of code shared by thousands of people over the years. Today we've got an adorable Raspberry Pi project to share created by the Infineon Team who's using a Pi to bring the GitHub Octocat mascot to life.
Most of the time when we describe a project as "bringing something to life," we're referring to a sort of robotics. Today is no exception, but there's a delightful twist that makes the creation notably interesting. The team is using pneumatics to make silicone tentacles flap on command. The Pi is able to address each tentacle using Infineon's new DC Motor Control HAT.
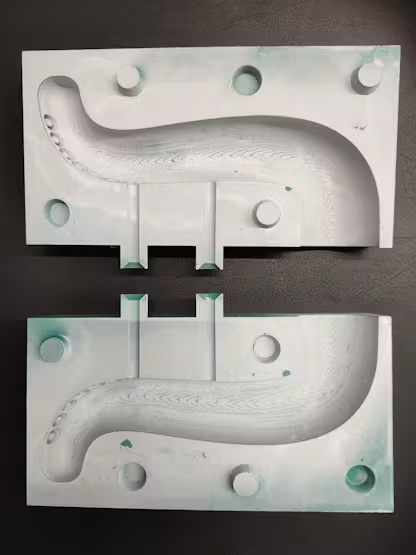
The head for Octocat was 3D printed using an FDM printer and finished by hand with paint. The tentacles, however, are another story. To create these, the team designed and printed a couple of molds and used silicone to form them. Each tentacle is controlled using pneumatic valves connected to the Infineon DC Motor Control HAT.

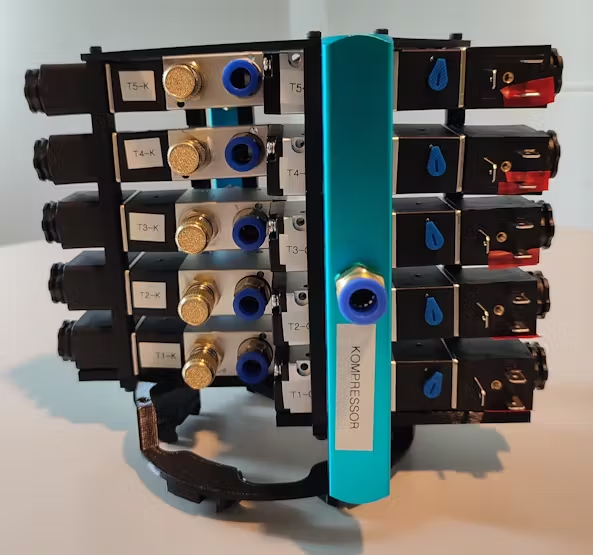
The valves are able to cause movement by filling small channels within each tentacle with air. This causes them to wiggle and flop in a more natural fashion, or at least as natural as pneumatic valves with silicone tentacles can be. According to Infineon, the DC Motor Control HAT sports a TLE94112ES chip that provides 12 half-bridge drivers and is able to operate a variety of actuators which includes the pneumatic valves implemented in Octocat's wiggly tentacle system.
The HAT includes libraries in both Python and C++. This provides a bit of flexibility when it comes to creating Raspberry Pi projects of your own. All of the code used in this project is completely open source and available for anyone to use and modify as desired.
If you want to get a closer look at this Raspberry Pi project and see it flop for yourself, head over to the official project page shared to Hackster. You can also find the DC Motor HAT over at Infineon's website.







